History:
The robot soccer game that iSoccerBot is designed for
is started and organized by FIRA (The Federation of International Robot-soccer Association) from Korea, which saw its first internation championship held in 1996 KAIST Korea.
Game Rules:
Like the human soccer game, the objective of the game is to score goals against your opponent team. The game is played in small league (3 vs 3), middle league (5 vs 5) and large league (11 vs 11).
The robot players are wheel based and they score the goal by pushing the orange golf ball into the opponent goal area. There is no restrictions to how the goal is scored and how the team is defending,
exept not to violate the following rules
1. Over Defending: Not more than THREE robot players (including goal keeper) are allowed in your own penalty area. Violation will result in penalty kick.
2. Charging Goalkeeper: The goal score is only valid when the opponent goal keeper is not pushed any offending players during the scoring attempt.
There are other rules like time-out call or free kick under dead ball situation. You may find details in FIRA Mirosot Robot Soccer Rules.
Length of Game:
The game consists of two half time, with 5 minutes for each half. Any stoppage time is not counted in the game time.
Referee:
The game referee is a qualified human being.
Playfiled for the game:
The games is playing in playfield (soccer pitch), whose physical dimensions is specifiied in the FIRA Mirosot Robot Soccer Rules
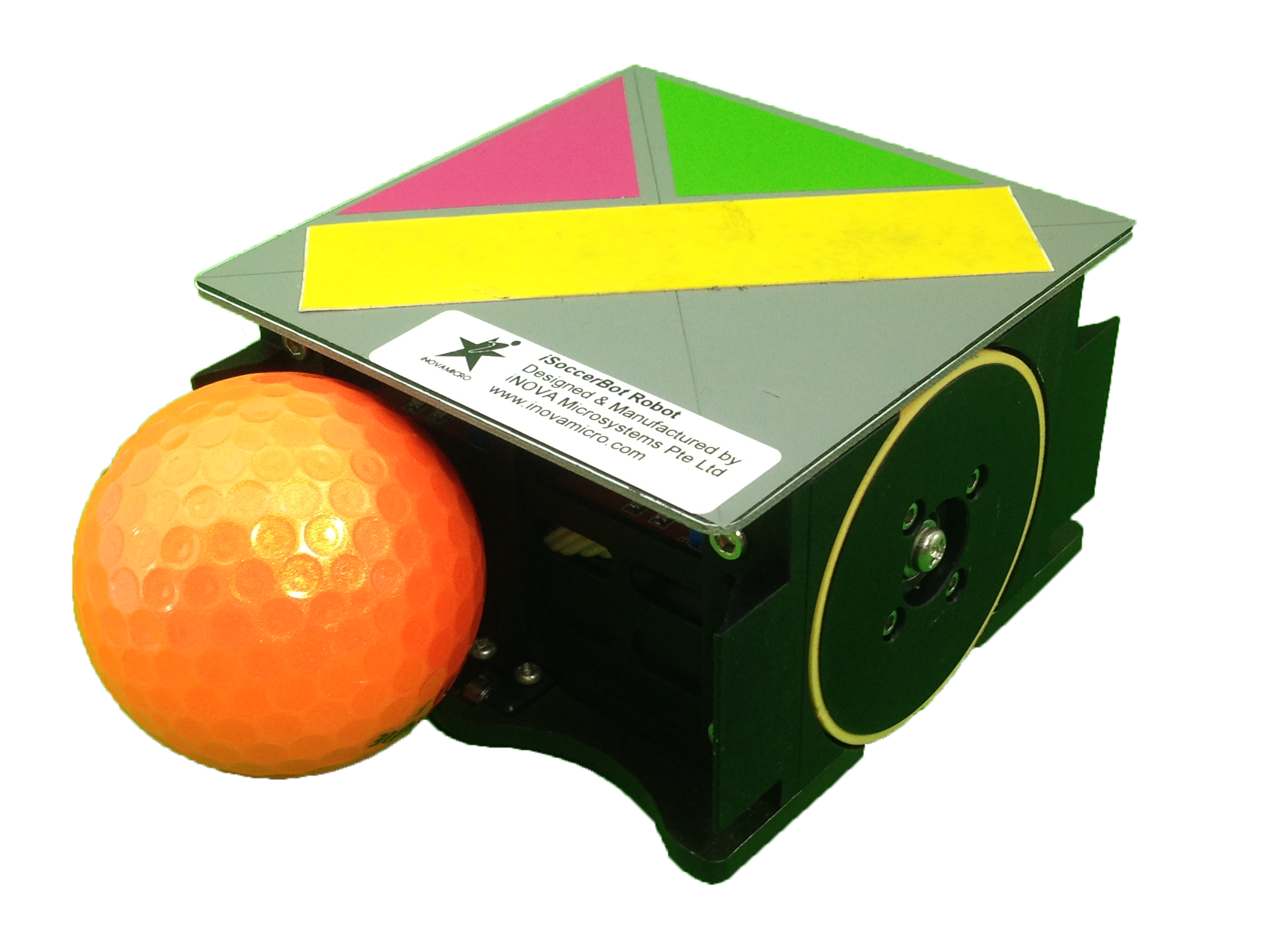
Robot Specification:
The robot player must conform the following specifciations
1. Size: Not bigger than 75mmX75mm.
2. Color ID: The robot must carry color ID that is contain BLUE or YELLOW color.
3. Dribbling Scoup: If the robot is eqipped with dribbling scoup, the depth of the scoup should be more than 30% of the golf ball diameter
Like human soccer game, the robot soccer game is a very exciting and entertaining with the robots are charging at 3m/s speed. You may refer to our game highligh video clip for more insights.
|